Ivan Kralj / December 1, 2025
Modern cities rely on a vast network of sensors, such as cameras, loop detectors, GPS traces, and roadside units, etc. In order to understand what is happening on their roads, these sensors collect massive streams of data every few seconds, capturing the movement of cars, the formation of traffic jams, and the dynamic changes of urban mobility. But as transportation systems grow more complex and more connected, a question arises: where should all this data be processed?
For years, the answer was to send everything to the cloud. But as sensor deployments scale into tens or even hunders of thousands and cities demand real-time responsiveness, the limitations of centralized systems become impossible to ignore. High network loads, single points of failure, privacy risks, and latency issues all become major obstacles.
These challenges are driving new evolutions in smart mobility. One such evolution is to process data closer to where data is generated. The outcome of such evolution is a system that doesn't rely on a single server, but distributed across small computing hubs deployed throughout the city, which we'll call cloudlets from now on.
In two recent research efforts, we explored how Spatio-Temporal Graph Neural Networks (ST-GNNs) can be trained not just in a single data center, but directly across many cloudlets working together. We further introduced a new adaptive method for reducing communication overload, ensuring that only the most essential information is shared between these cloudlets.
This blog post explains these ideas such as:
- Why traffic prediction is so hard?
- Why centralizing everything no longer works?
- How semi-decentralized learning across cloudlets can help?
- Why sudden traffic events (such as traffic jams and its recoveries) require new evaluation metrics?
- How adaptive pruning can reduce communication without harming prediction accuracy?
Case Study: Real-Time Traffic Monitoring
Traffic prediction is one of the most challenging applications of AI in smart cities. Unlike typical time-series data, traffic is a living system. What happens on one road segment often depends on what is happening nearby. Meaning that one slowdown can ripple outward into a full traffic jam.
Modern models, especially Spatio-Temporal Graph Neural Networks (ST-GNNs), are designed to capture this complexity. They treat the road network like a living graph:
- Nodes = sensors on the road
- Edges = physical connections between road segments
- Temporal data = how sensor data, such as vehicle speed, changes over time
ST-GNNs learn patterns across both space (neighbouring sensors) and time (how conditions evolve. However, ST-GNNs require a lot of information from many sensors at once. Each sensor needs not only its own data, but also data from its neighbours, and its neighbours' neighbours, and so on. This means enormous amounts of data must be collected and processed together. Traditional single-server systems struggle with this for several reasons:
- Scalability: sending all sensor data to a single location creates bottlenecks.
- Reliability: if the central server fails, the entire system becomes unusable.
To overcome these problems, we explore a different idea. More specifically, instead of sending all data to one place, we move data processing closer to the sensors.
Case Study: Real-Time Traffic Monitoring
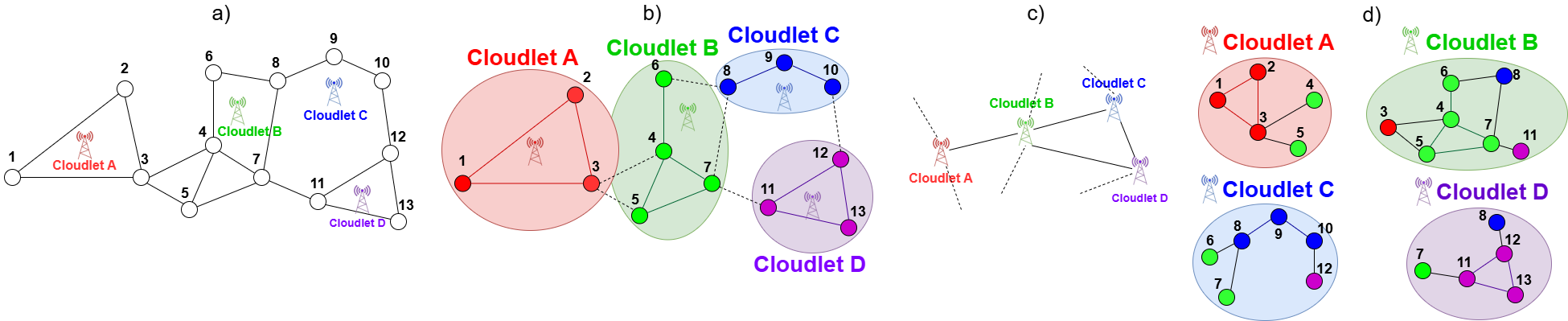
Imagine small computing hubs scattered throughout a city's road network, i.e. cloudlets. These cloudlets can be placed on base stations, fiber cabinets, roadside units, and so on. They serve as local intelligence centres for nearby sensors. Each cloudlet:
- Receives data from sensors within its range
- Trains its own local ST-GNN traffic prediction model
- Communicates only with neighbouring cloudlets
- Collaborates with other cloudlets to produce a city-wide traffic prediction model
This forms a semi-decentralized learning system, sitting between fully centralized and fully peer-to-peer designs. Figure 1 provides a visual overview of this architecture.
We studied four collaborative learning strategies:
- Centralized – serving as baseline model to compare other strategies
- Traditional Federated Learning – cloudlets train locally, and send model updates to a central aggregator
- Server-Free Federated Learning – cloudlets exchange model updates directly among themselves, without the need of a central aggregator
- Gossip Learning – cloudlets send model updates to a randomly selected cloudlet
Our results showed that all semi-decentralized approaches perform almost as well as centralized training. But decentralization also introduced communication overhead.
The Hidden Challenge: Communication Overhead
Even though cloudlets train models locally, ST-GNNs require information from neighbouring sensors, which may belong to other cloudlets. This means cloudlets must frequently exchange sensor data from other cloudlets. Our studies revealed that this sensor data exchange is the single largest communication cost in semi-decentralized ST-GNN training. Meaning that cloudlets often have duplicate data and process the exact same information. And so, we ask ourselves if we really need to send all neighbouring sensor data all the time? The answer is no, but only if we understand when spatial information truly matters [1].
Why Sudden Traffic Events Change Everything
Standard research traffic prediction metrics, such as MAE, RMSE, and WMAPE, measure average error. But this information doesn't tell us important information such as when will traffic congestion happen, or identifying recoveries from congestions. These abrupt changes are what drivers care about, navigation systems care about them, and traffic management centers also care about them.
Most of the existing research work do not evaluate how well models detect these events. This motivated us to introduce a new metric we call Sudden Change in Speed Rate (SCSR) [2]. A metric designed to measure how reliably a model detects sudden drops and sudden recoveries in vehicle speed. With SCSR, we can see something traditional metrics fail to show:
- SCSR drops significantly without spatial context compared to standard evaluation metrics, especially for predictions far into the future
- Graph connectivity matters, especially during abrupt changes
These insights guided the development of our second major contribution.
Adaptive Cross-Cloudlet Pruning: Reducing Communication Without Losing Accuracy
Once we understood that spatial context matters most during sudden events, we designed an algorithm that dynamically decides which neighbouring nodes a cloudlet truly needs [2]. The algorithm continuously answers two questions:
- Is traffic stable or changing rapidly?
- Which neighbouring nodes contain the most relevant information right now?
When traffic is calm, cloudlets prune unnecessary neighbours, which in turn reduces communication. When sudden changes occur, they retain or increase context. Figure 2 illustrative this adaptive flow.
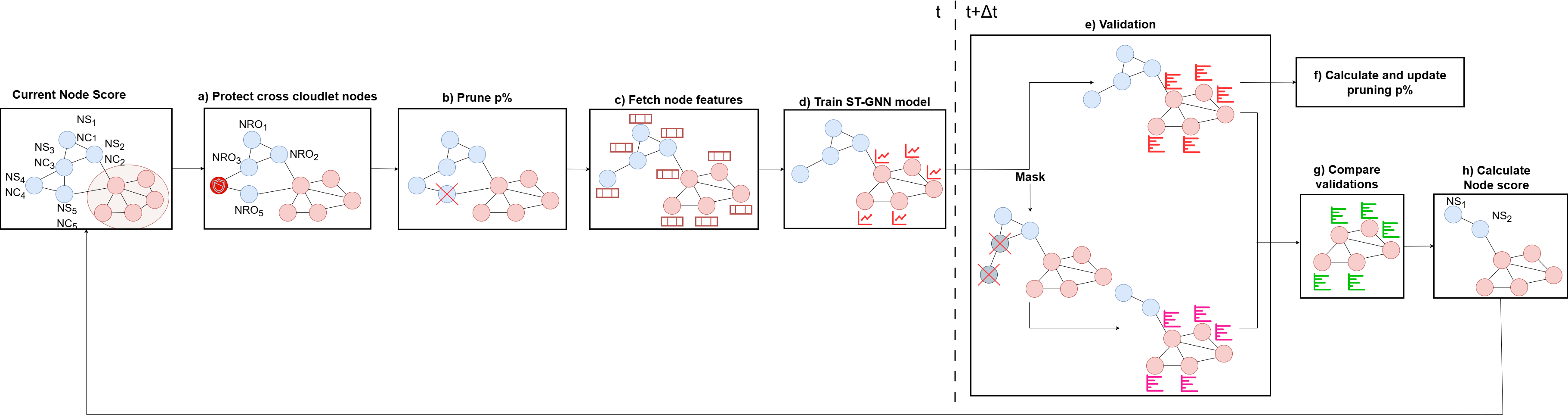
With this algorithm, we achieved significant communication reduction, stable prediction accuracy across all prediction horizons, better bandwwidth efficiency across the network, and automatic adaptation to traffic dynamics, demonstrating that ST-GNNs can be trained on semi-decentralized infrastructure without sacrificing the prediction accuracy.
Looking Ahread: Personalization, Smarter Connectivity, and Cloudlet Optimization
While our current work focuses on cloudlet collaboration and adaptive pruning, our work can be improved in several areas:
- Personalized cloudlets - cloudlets could fine-tune their models based on local traffic patterns
- More efficient spatial modeling - the road graph could be refined so that only meaningful spatial connections are preserved, saving computation
- Optimized cloudlet placement - cities could strategically deploy cloudlets based on predicted communication needs and traffic density
Conclusion: A Step Toward a More Decentralized Traffic Mobility
Traffic prediction is no longer just a question of computing power, it's about where and how that computing happens. By moving intelligence closer to the sensors and reducing unnecessary communication, our work managed to take a major step toward more scalable and resilient smart mobility systems. Our research demonstrated that:
- Decentralized ST-GNN training is not only feasible but highly practical
- Communication-efficient learning is essential for real-world deployment
- Sudden events are essential for drivers, navigation systems and traffic management centers
- Adaptive pruning makes real-world deployment of ST-GNNs far more practical by preserving accuracy while reducing communication cost
Together, these innovations represent an important step toward traffic prediction systems that are closer to the road, faster to react, and smarter in how they learn.
References
[1] Kralj, Ivan, et al. "Semi-decentralized training of spatio-temporal graph neural networks for traffic prediction." 2025 IEEE International Conference on Edge Computing and Communications (EDGE). IEEE, 2025.
[2] Kralj, Ivan, et al. " Adaptive Graph Pruning with Sudden-Events Evaluation for Traffic Prediction using Online Semi-Decentralized ST-GNNs"